







El movimiento es una parte integral de la robótica móvil. Ya sea que los robots levanten un objeto, hagan girar una rueda o realicen alguna otra acción, casi siempre incluyen algún tipo de actuador. La forma más común de lograr dicho movimiento es a través del uso de un motor, y el tipo más común de motor utilizado en la robótica de aficionados o competencia es el motor de corriente continua ("CC").
Los motores de corriente continua, en su núcleo, operan bajo un principio directo: la conversión de energía eléctrica (un voltaje de entrada y corriente extraída en energía mecánica (un eje de salida que gira a cierta velocidad con una cierta cantidad de torque).
La cantidad de salida mecánica producida por un motor depende de la cantidad de carga que se le aplique. Este concepto es clave para entender el rendimiento del motor de CC. A medida que aumenta la carga (o resistencia mecánica), los motores extraerán más corriente y generarán más par motor para superar esta carga. Sin embargo, a medida que aumenta el par, la velocidad disminuye proporcionalmente. Además, a medida que aumenta el consumo de corriente, la vida útil de la batería disminuye y aumenta el desgaste del motor.
Para obtener más información sobre las relaciones entre la velocidad, el par y la potencia, visite la Unidad F.4 del plan de estudios VEX IQ o 7.2 del plan de estudios VEX EDR.
Para un análisis más profundo de los motores de CC y su uso en robótica, visite la Unidad 7.3 del Currículum EDGE de VEX.
Estas ventajas y desventajas deben considerarse al diseñar un mecanismo que utiliza un motor en una aplicación particular. Para ayudar a comprender las capacidades de un motor específico en dicha aplicación, se utilizan cuatro características clave para definir el rendimiento de un motor:
Estas características representan las condiciones mínimas y máximas teóricas para un motor. Sin carga, un motor gira a su velocidad libre y extrae una corriente libre. Por el contrario, Stall Torque y Stall Current representan un motor trabajando al máximo, hasta el punto en que ya no puede moverse.
En un buen diseño de mecanismo, los motores raramente operan en una de estas cuatro condiciones de borde. Sostener algo al momento de parada (con voltaje máximo de entrada) es una gran manera de destruir rápidamente un motor, y girar a velocidad libre garantiza que se pueda realizar muy poco trabajo (ya que la velocidad máxima corresponde al par cero). En cambio, los ingenieros usan curvas de motor para optimizar el uso del motor en algún lugar en el medio.
Las curvas del motor de VEX Robotics se desarrollaron experimentalmente mediante una prueba dinamométrica "descendente".
1. Un motor se gira a velocidad libre
2. Se aplica lentamente un freno (aumentando linealmente el torque a lo largo del tiempo), reduciendo el motor a un RPM predeterminado
3. El freno se libera lentamente y el motor puede volver a su velocidad libre
Durante toda esta prueba se toma una variedad de datos, como velocidad de salida, par de salida, consumo de corriente y entrada / salida de potencia. El lado "hacia abajo" (freno aplicado) luego se promedia con el lado "arriba" (freno liberado).
La mecánica de una prueba de dinamómetro es crucial para desarrollar y publicar especificaciones precisas del motor. Cuando un motor gira a velocidad libre mientras está conectado a un tambor de ensayo, el sistema contiene una gran cantidad de inercia rotacional. Esta inercia complementa la propia salida del motor, creando una lectura falsa para la potencia máxima de salida que puede ser mayor que el rendimiento real del motor.
Sin embargo, los fabricantes no siempre se ajustan para la cancelación de la inercia al medir el rendimiento de su motor, y las hojas de especificaciones rara vez detallan las circunstancias bajo las cuales se obtuvo su información.
Al probar y promediar los lados "hacia abajo" (inercia que ayuda al motor) y "hacia arriba" (resistencia a la inercia del motor), este método es la mejor manera de representar la verdadera capacidad de un motor.
Las curvas de motor se utilizan principalmente en dos escenarios: determinar qué motor (y reducción de engranaje) usar en una aplicación en particular, y aprender más sobre el estado de un motor que opera actualmente en un sistema.
En la competencia robótica, la tarea que se realizará tendrá que ser definida y modelada por el diseñador. Como un ejemplo simplificado, considere una pieza de juego que pesa 40.0 N, siendo levantada por un brazo que tiene 0.5 m de largo, corriendo a través de una caja de engranajes de 100: 1:

Nota: Para obtener más información acerca de cómo la relación de transmisión puede afectar la velocidad y el par, visite la Unidad G.3 de la Currícula de IQ de VEX o la Unidad 8.4 de la Currícula de EDR de VEX.
Este requisito de par de salida se puede comparar con las Curvas de motor publicadas para obtener más información sobre el estado del motor durante esta acción. Considere las siguientes dos curvas [haga clic para agrandar]:

El motor A alcanza 0.2 N · m de torque a aproximadamente 13000 RPM, dibujando aproximadamente 40 A.
Con una caja de engranajes 100: 1, esto equivale a una velocidad de brazo de 130 RPM.
Con este par, el motor funciona con un 60% de eficiencia, por debajo de su pico.
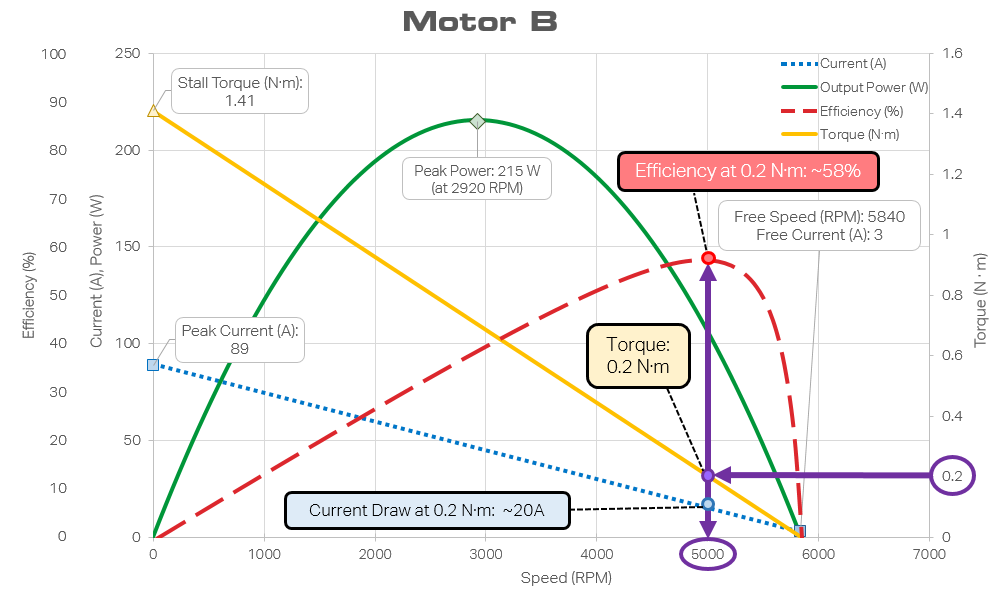
El motor B puede alcanzar 0,2 N · m de par a aproximadamente 5000 RPM, obteniendo aproximadamente 20 A.
Con una caja de engranajes de 100: 1, esto equivale a una velocidad de brazo de 50 RPM.
Con este par, el motor funciona con una eficiencia de alrededor del 60%, muy cerca de su pico.
Usando este tipo de cálculos, un ingeniero puede combinar esta información con otros detalles del sistema para determinar el mejor motor para su aplicación. ¿50 RPM es demasiado lento? ¿Es 40 A demasiado alto de un consumo de corriente? ¿Se necesita una mayor eficiencia por razones térmicas o de batería?
Como debería hacerse evidente rápidamente, hay una serie de variables involucradas en hacer esta determinación. Relación de engranaje, longitud de brazo, incluso peso de pieza de juego. Muchas veces, los diseñadores desarrollarán calculadoras de hoja de cálculo para modificar estos valores y buscar una condición que satisfaga sus necesidades.
Para un cálculo aún más rápido de "la parte posterior de la servilleta", los diseñadores a veces simplemente calculan la cantidad de trabajo realizado (Trabajo = Masa × Gravedad × Altura) durante un período de tiempo determinado (Potencia = Trabajo ÷ Tiempo) y seleccionan un motor que coincida ese requerimiento de potencia. Por ejemplo, si un robot tuvo que levantar un objeto de 20.0 kg 1.0 m en el aire durante 1.0 segundo:

En el ejemplo anterior, el motor B sería la combinación más cercana para un requerimiento de potencia de 196 W.
Sin embargo, ¿qué sucede cuando hay dos motores que coinciden con la necesidad máxima de potencia? En general, es mejor elegir el motor con el consumo de corriente más bajo, ya que prolongará la duración de la batería y reducirá la tensión en el sistema eléctrico. Esto se vuelve especialmente importante bajo una carga sostenida, cuando se deben tener en cuenta los limitadores de corriente o los interruptores automáticos. Esto se trata con más detalle a continuación.
If a motor has already been installed and an engineer wants to know more about the state of the system, the same theory as above can be reversed. At a known voltage, it takes one measured value (such as current draw) to determine the rest of the motor’s attributes at that moment.
For example, again consider Motor A. If an ammeter is used to measure a current draw of 25 A, then it is now known that the motor is exerting around 0.11 N · m of torque and is operating around its peak efficiency of just under 70%. However, if the ammeter is reading 140 A, then the motor is currently operating under an extreme stall condition.
Note: VEX Robotics motor curves were made at 12 V. The four key characteristics (free speed / current, stall torque / current) approximately scale proportionally with system voltage. If Motor A was running at 6 V, its stall current would drop from 130 A to 65 A, and its stall torque would drop from 0.7 N · m to 0.35 N · m. If an ammeter reading showed a current draw of 25 A:

Si bien las curvas de motor son una herramienta inmensamente útil para usar durante el diseño del mecanismo, hay algunas otras características de un motor o sistema a tener en cuenta.
La mayoría de los motores, si se los empuja a su par de parada o potencia máxima, se consumirán si se dejan allí durante demasiado tiempo. Sin embargo, ese tiempo aceptable varía de un motor a otro. Algunos motores pueden tener una potencia máxima muy alta, pero solo pueden funcionar con esa potencia máxima en ráfagas cortas. Otros motores no tienen problemas para alcanzar su máxima potencia, pero pueden tener otros inconvenientes (mayor consumo de corriente, menor potencia de pico, etc.).
Debido a que esta propiedad es tan inherentemente dependiente del sistema y la aplicación, no suele ser publicada por los fabricantes. Sin embargo, la masa térmica se puede aproximar dividiendo la potencia máxima de un motor por su peso. Por ejemplo:
| Potencia máxima | Peso del motor | Masa térmica | |
|---|---|---|---|
| Motor A | 330 W | 0.75 lb | 440 W/lb |
| Motor B | 215 W | 2.16 lb | 99.5 W/lb |
In this scenario, Motor A would be more useful for shorter bursts of high power, while Motor B could sustain its power for much longer. However, this comparison should only be used as a relative approximation, not as a firmly defined property.
La mayoría de los robots competitivos implican algún tipo de corte de seguridad, como un corte térmico dentro del motor o un interruptor de circuito limitador de corriente. Estos límites deben tenerse en cuenta al determinar un consumo de corriente aceptable para una aplicación determinada.
Los interruptores generalmente pueden mantener un consumo de corriente más allá de su clasificación por un período de tiempo determinado. Los fabricantes generalmente proporcionan una hoja de especificaciones que incluye un gráfico como el siguiente, tomado de los interruptores automáticos de acción 20A / 30A Snap Action VB3. vendido por VEXpro:

Si el motor A del ejemplo anterior (plano 40 A) estuviera conectado a través de un interruptor de 20 A, estaría tirando el 200% de la corriente nominal del interruptor. Al hacer referencia a esta tabla, el sistema podría sostener esta extracción durante aproximadamente 1 - 4 segundos antes de disparar el interruptor y cortar la potencia del motor.
Aunque las curvas de los motores se construyen de forma experimental, los cálculos para los que se utilizan ignoran muchas características del sistema real, como la fricción, la carga de choque o los efectos de la gravedad (como mover un brazo hacia arriba o moverlo hacia abajo). En algunos casos, estas suposiciones se prestan a un cálculo más conservador; en algunos casos, lo opuesto es verdad.
Es importante recordar que el proceso de diseño de ingeniería consiste en mucho más que cálculos basados en hojas de especificaciones y gráficos: una vez que se ha establecido una dirección, es hora de construir un prototipo, probar e iterar según sea necesario.
