







Arquitectura del sistema
El desarrollo del sistema V5 comenzó con un mantra: "Simple ... Flexible ... Potente ..."
- Simple... para hacer VEX EDR más accesible a los principiantes
- Flexible... para asegurar que su robot pueda hacer lo que quiera
- Poderoso... lo suficiente para enfrentar desafíos futuros
Basado en el éxito del sistema de control VEX IQ, VEX se propuso replantear el sistema de control VEX EDR desde cero. Nuestra empresa usó un método revolucionario, en oposición al evolutivo, que nos permitió repensar todas las decisiones previas, sin tener que lidiar con la compatibilidad del sistema anterior.
Intentamos desarrollar una interfaz moderna de estilo de teléfono inteligente, datos de sensor fáciles de visualizar y motores que fueran extremadamente consistentes, independientemente del voltaje de la batería. Para obtener la mejor experiencia posible para el cliente, unánimemente no quería que los patrones de parpadeo del LED, los disyuntores se dispararan o las conexiones eléctricas flojas.
A menudo encontramos los objetivos de simple, flexible y poderoso para estar en desacuerdo el uno con el otro. Fue solo durante un viaje de cuatro años de lucha, innovación y trabajo duro que finalmente encontramos el verdadero logro de nuestros esfuerzos: Inteligente Simplicidad.
VEX Robotics ha construido robustos sistemas inalámbricos de control de robots desde 2001. Los empleados de VEX tienen más de 800 años de competencia y experiencia en robótica educativa. V5 es la culminación de todo lo que nuestra empresa ha aprendido y todo lo que queríamos que experimentaran nuestros clientes. Sinceramente esperamos que lo ames.
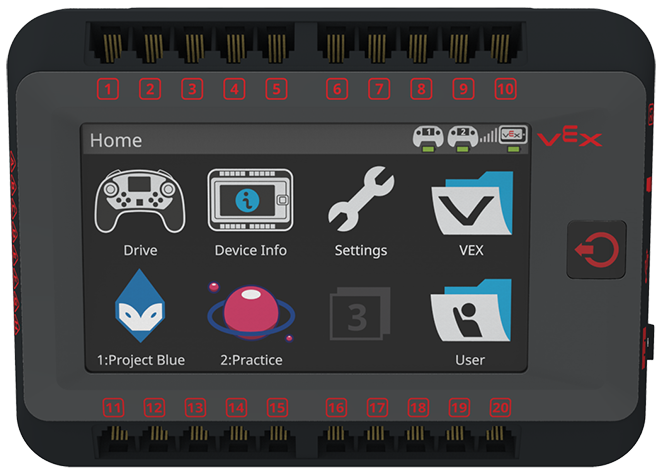
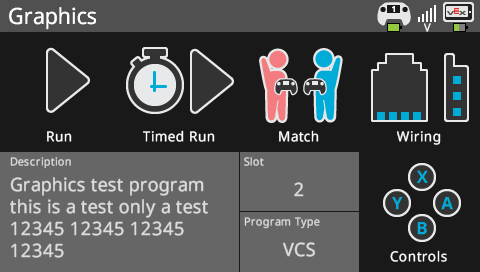
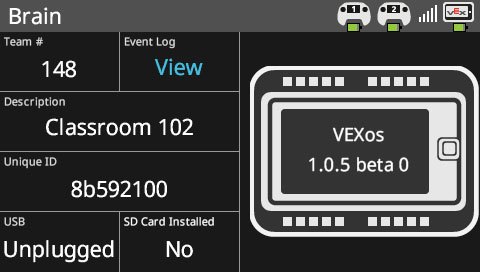
Cerebro del Robot V5 - Interfaz de usuario
Las interfaces simples de usuario con pantalla táctil son familiares para casi todos, lo que hace que V5 sea más accesible. El Cerebro del Robot V5 tiene una pantalla táctil a todo color de 4.25 "con 480 x 272 píxeles.
- Las características de la interfaz de usuario incluyen lo siguiente:
- Seleccione y ejecute uno de los 8 programas de usuario
- Ejecutar programas VEX integrados
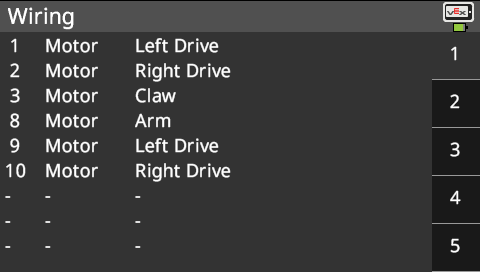
- Acceder a las listas de cableado del programa
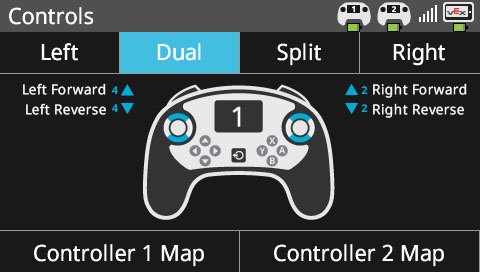
- Acceder a los controles del programa
- Ejecutar partidos de práctica
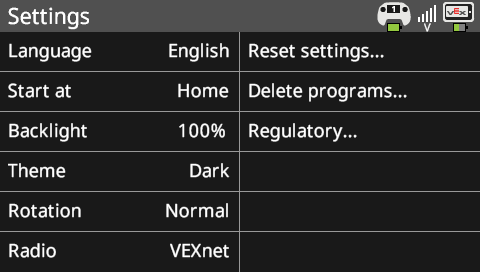
- Cambiar idiomas
- Seleccionar temas y retroiluminación
- Rotación de pantalla, y mucho más ...
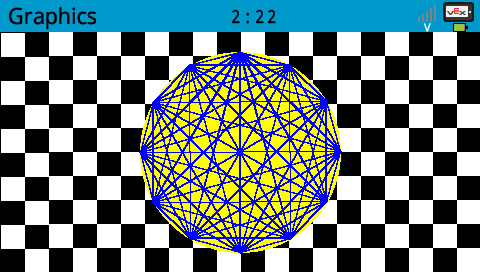
Los programadores también pueden hacer uso de la pantalla táctil con la capacidad de dibujar píxeles, líneas, rectángulos y círculos, junto con el color de línea, el ancho y el control de relleno. Se incluyen fuentes multilenguadas y multilingües en cualquier color. Los programas de usuario se dibujan de manera rápida y eficiente en la memoria interna con búfer dual, y la FPGA maneja la actualización de la pantalla a 60 Hz.
La flexibilidad se puede encontrar en todos los aspectos del robot V5 Robot:
- Motores inteligentes
- Sensores inteligentes
- Sensores analógicos
- Sensores digitales
- Expansión de tarjeta microSD
- Diagnóstico a bordo
- Listas de cableado de dispositivos
- Mapas de controlador
- Verificación de cableado automático
- Actualizaciones automáticas de firmware del dispositivo



















Cerebro del Robot V5 - Rendimiento
Potentes procesadores, combinados con el sistema operativo VEXos, permiten a V5 aprovechar la próxima generación de robótica educativa.

V5 utiliza una nueva tecnología que llamamos "Inteligencia Centralizada", que proporciona al procesador del usuario toda la información del sensor. Todos los Sensores Inteligentes tienen su propio procesador, lo que les permite recopilar y procesar datos de manera simultánea lo más rápido posible. La nueva información es instantáneamente enviada a la memoria RAM local de alta velocidad del procesador del usuario sin interrumpir el procesador. Cada vez que una línea de código solicita datos del sensor a medida que se ejecuta el programa del usuario, como la posición del motor, se accede instantáneamente al cálculo más reciente desde la memoria.
"El procesador del usuario esencialmente conoce todos los datos del sensor instantáneamente".
La comunicación de datos del sensor al cerebro utiliza RS-485, al igual que CAN sin la sobrecarga, que es inmune al ruido y la electricidad estática. Cada sensor es el controlador maestro para su propio bus de 1.5 Mbps, lo que significa que controla cuándo y con qué frecuencia se envían los datos al cerebro.
El V5 Robot Brain tiene 21 puertos inteligentes disponibles. Cada uno de estos están equipados con un interruptor de circuito digital, llamado eFuse, que permite la protección contra cortocircuitos sin limitar el rendimiento del motor. Estos eFuses nos permitieron eliminar los dispositivos PTC en el cerebro y los motores que limitaban el rendimiento en el sistema Cortex.
VEXos
VEXos es un sistema operativo de robótica que aprovecha la flexibilidad y la potencia del hardware VEX tanto para los rigores de la competencia como para las diversas necesidades de la educación. Este sistema operativo, escrito completamente por VEX, utiliza el procesamiento en tiempo real para una operación repetible a las velocidades más rápidas posibles. Los estudiantes pueden comenzar a programar rápidamente debido al entorno de programación estrechamente acoplado de VEX Coding Studio.
VEXos elimina las complejidades y la naturaleza continuamente cambiante de los sistemas operativos comerciales como Linux y Android. Al no utilizar estos sistemas operativos comerciales, VEXos no requiere una gran cantidad de memoria flash, RAM y costosos procesadores. Esto reduce el costo y la complejidad, simplifica la programación del usuario y mejora enormemente el rendimiento y la repetibilidad.
- Características de VEXos
- Identificación, comunicación y actualizaciones de sensores inteligentes
- Controles para garantizar que su programa coincida con el cableado de los robots
- Distribución y monitoreo de energía de la batería
- Comunicación a través de VEXnet, BluetoothⓇ, USB y conexión
- Integración de VEX Coding Studio
- Funciones VEXos
- Soporte de procesador multi-core
- Soporte multilingüe
- Recogida de datos del sensor
- Acceso a datos del programa de usuario
- Sistema de archivos y gestión de memoria
- Diagnósticos y registro de eventos
- Hardware API
- Bibliotecas de software

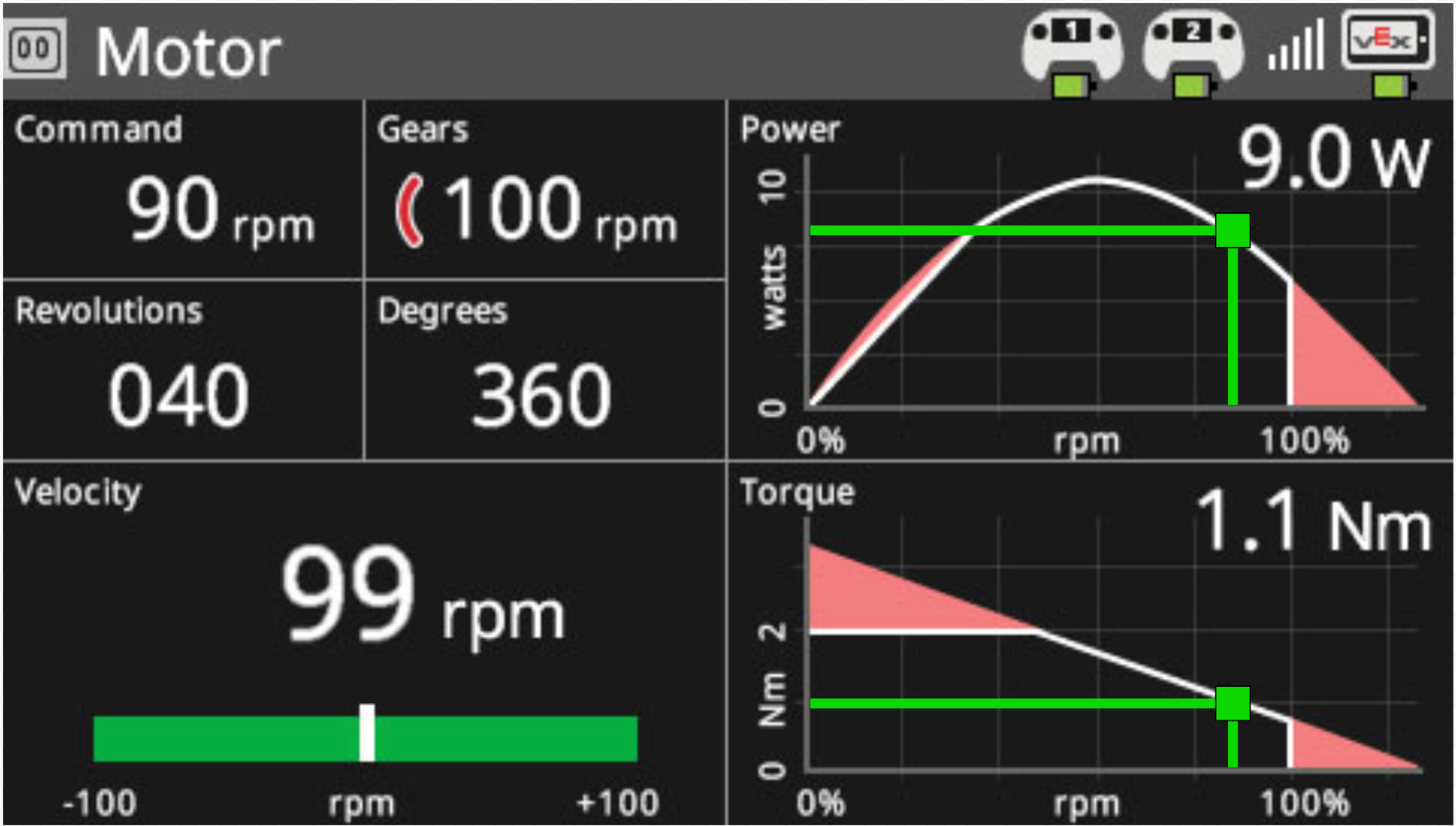
Motor Inteligente V5
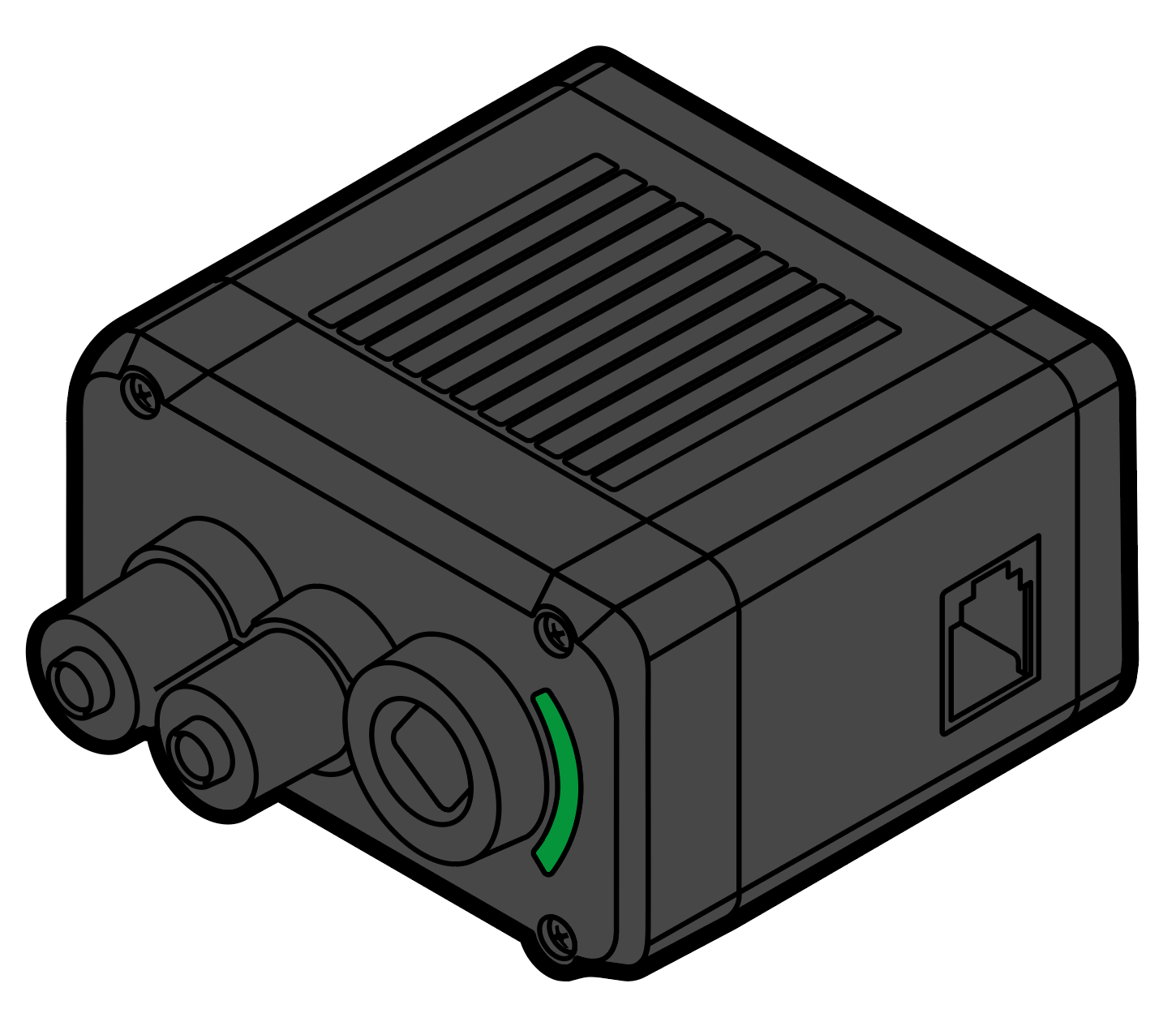
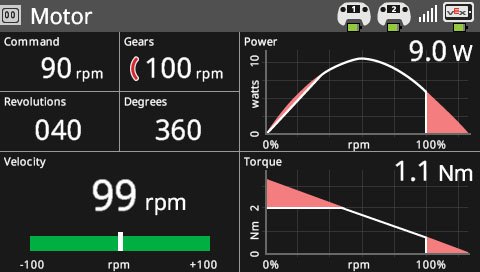
El Motor Inteligente V5 tenía que ser perfecto para que V5 tuviera éxito. Miles de horas de ingeniería y análisis entraron en el diseño de este motor. Todo debe funcionar en conjunto: motor, engranajes, codificador, cartucho de engranajes modular, placa de circuitos, gestión térmica, embalaje y montaje. Los usuarios pueden controlar la dirección, la velocidad, la aceleración, la posición y el límite de torsión del motor.

Este gráfico lo dice todo. La potencia máxima es de 11W continuo y la torsión máxima es de 2.1 Nm. La velocidad libre está limitada por el software del procesador del motor para mantener el rendimiento consistente de motor a motor y para permitir la velocidad máxima bajo cargas.
El diseño del engranaje interno del Motor Inteligente V5 debe resistir toda la potencia del motor y los abusos de las fuerzas externas que ingresan al motor desde los brazos cargados y el impulso del robot. El tren de engranajes es nuestro más robusto hasta el momento. Los engranajes de metal se utilizan en todas las ubicaciones de alta torsión para la fuerza. Los engranajes de plástico se utilizan en ubicaciones de baja carga y alta velocidad para un funcionamiento suave y eficiente. Un cartucho de engranaje interno es modificable por el usuario para relaciones de engranajes de salida de 6: 1, 18: 1 y 36: 1.
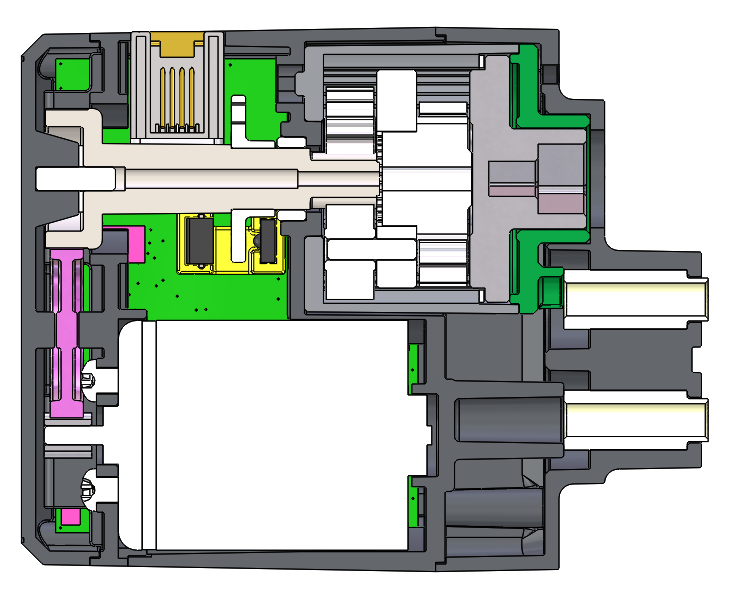
El circuito interno del motor tiene un puente H completo y su propio microcontrolador Cortex M0 para medir la posición, velocidad, dirección, voltaje, corriente y temperatura. El microcontrolador ejecuta su propio PID con control de velocidad, control de posición, control de par, ganancia de avance y planificación de movimiento similar a los robots industriales. El PID se calcula internamente a una velocidad de 10 milisegundos. Los valores PID del motor están preajustados por VEX para un rendimiento excelente en todas las condiciones de funcionamiento. Los usuarios pueden ajustar estos valores para ajustar el rendimiento del motor para su aplicación específica.
Los usuarios avanzados pueden pasar por alto el PID interno y tomar el control directo con el control PWM sin modificar. El control sin procesar todavía tiene los mismos límites de rpm, límites de corriente y máximo de voltaje que mantienen idéntico el rendimiento del motor.
"El rendimiento motor constante es un cambio de juego"
Una de las capacidades más exclusivas del Motor Inteligente V5 es un rendimiento completamente constante. El motor funciona internamente a un voltaje ligeramente más bajo que el voltaje mínimo de la batería, y la potencia del motor se controla con precisión a +/- 1%. Esto significa que el motor realizará lo mismo para cada partido y cada carrera autónoma, independientemente de la carga de la batería o la temperatura del motor.
La corriente de pérdida está limitada a 2.5 A para mantener el calor bajo control sin afectar la salida de potencia máxima. La limitación de la corriente de pérdida elimina la necesidad de fusibles de reinicio automático (dispositivos PTC) en el motor, lo que puede causar interrupciones involuntarias del motor. El límite de 2.5 A elimina esencialmente la región indeseable de la curva de rendimiento del motor, lo que garantiza que los usuarios no creen involuntariamente situaciones de bloqueo. Finalmente, para asegurarse de que el motor dure, se controla la temperatura interna. Si un motor se acerca a una temperatura insegura, el usuario recibe una advertencia. Si el motor alcanza su límite de temperatura, el rendimiento se reduce automáticamente para garantizar que no ocurra ningún daño.
El motor calcula la potencia de salida, la eficiencia y el par de torsión precisos, dando al usuario una verdadera comprensión del rendimiento de los motores en cualquier momento. La posición y el ángulo se informan con una precisión de .02 grados. Todos estos datos se informan y grafican en el tablero del motor.
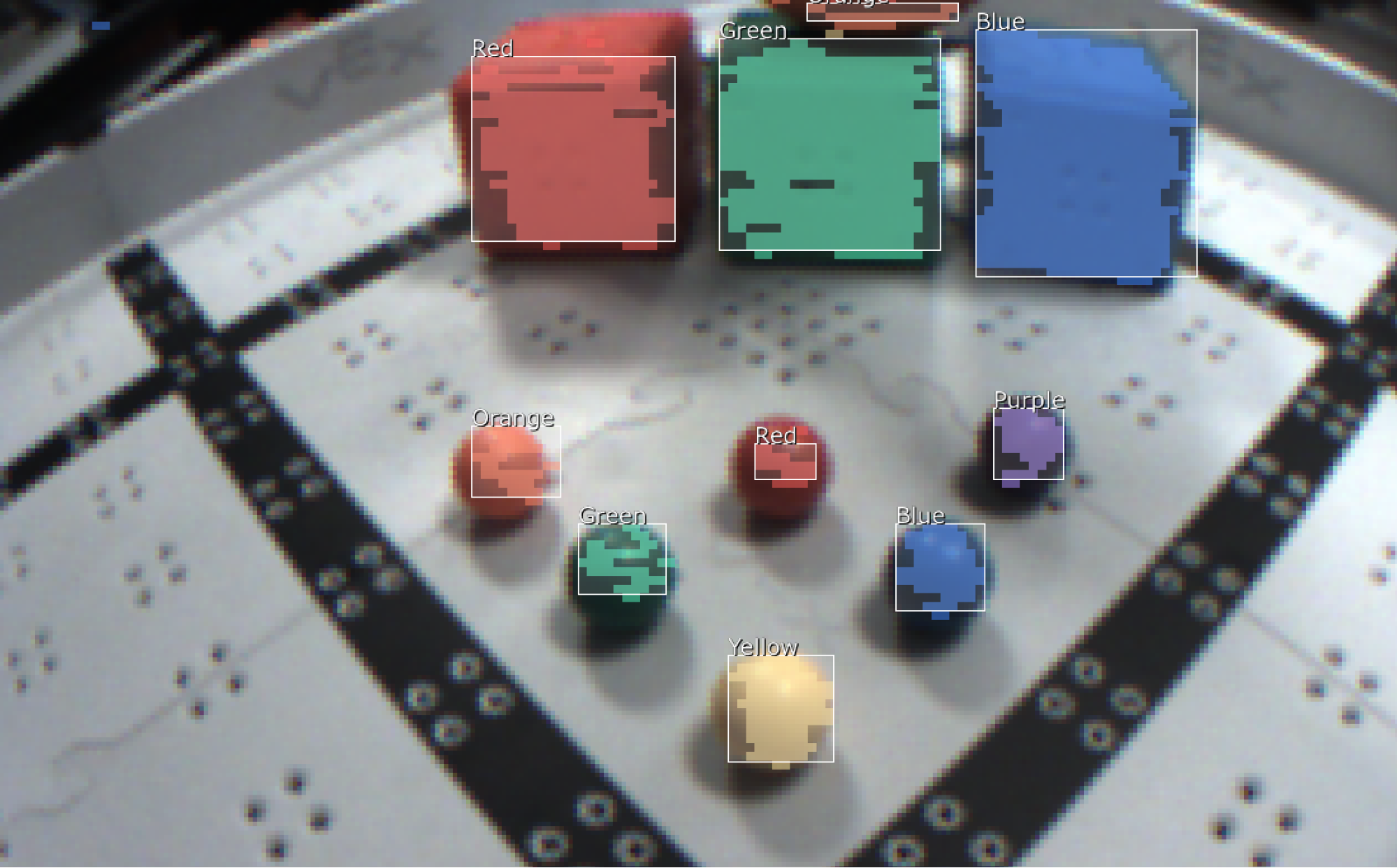
Sensor de visión V5

El sensor de visión proporciona un robot con nuevas capacidades y permite un aprendizaje ampliado. En su modo más básico, el sensor le indica dónde se encuentra un objeto de color. El valor X de la ubicación te da la posición derecha e izquierda. Cuando la cámara está inclinada hacia abajo, el valor Y le proporciona la distancia al objeto, con un poco de trigonometría básica de su parte.
El sensor de visión combina un procesador dual ARM Cortex M4 + M0, cámara a color, WiFi y USB en un solo sensor inteligente. El sensor puede ser entrenado para ubicar objetos por color. Cada 200 milisegundos, la cámara proporciona una lista del objeto encontrado que coincide con hasta ocho colores únicos. Se proporciona la altura, el ancho y la ubicación del objeto. Los objetos multicolores también se pueden programar, permitiendo que los códigos de color brinden nueva información al robot. Los códigos de color pueden representar todo lo que desee, incluida la ubicación, el tipo de objeto, las señales de tráfico, las instrucciones de movimiento, los identificadores de robot, etc.

El sensor de visión tiene USB para una conexión rápida y directa a su computadora. Esto le permite ver imágenes y resultados de visión artificial simultáneamente.
El sensor de visión también tiene WiFi Direct y actúa como un servidor web. Esto le permite ver de forma inalámbrica el video "en vivo" desde cualquier computadora equipada con un navegador y WiFi.
El sensor de visión agregó mucho a las capacidades de los robots V5, también agregamos un puerto compatible con VEX IQ para compartir la diversión.
- Capacidades futuras que planeamos agregar:
- Seguimiento de línea avanzado con ubicación de línea, ángulo e intersecciones
- Sensores genéricos de color
- Medidor de nivel de luz
- Detección de movimiento
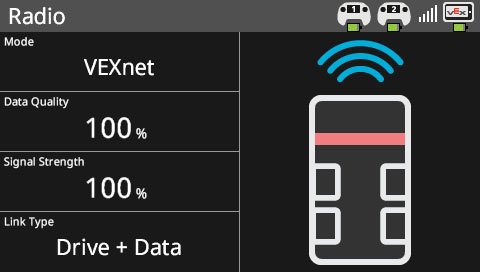
Conectividad inalámbrica

El Radio del Robot V5 y el controlador V5 usan nuestro protocolo VEXnet 3 de próxima generación. Esto se basa en el éxito de VEXnet 2 y agrega funciones adicionales y canales de descarga más rápidos. VEXnet admite 500 canales de robot simultáneos, incluso cuando se trabaja en espacios reducidos. La radio proporciona el control de latencia y bajo nivel de respuesta que los conductores esperan, al tiempo que permite descargas rápidas de programas y comentarios de robots.
Ambas radios V5 también son compatibles con Bluetooth 4.2, gracias a la MCU inalámbrica inteligente Bluetooth MC2640 de Texas Instruments. Con esto, las tabletas podrán descargar programas al Cerebro del Robot. Esto también permite la conectividad a múltiples dispositivos a la vez. Las actualizaciones futuras agregarán comunicaciones de Robot a Robot. VEXnet 3 y Bluetooth se pueden usar para manejar, descargar y depurar. Los controladores se pueden atar juntos para soporte de controlador dual.

Dos nuevas características del modo de práctica facilitan la práctica de los partidos y los desafíos de habilidades. El controlador hace todo el control de tiempo y modo para usted. Elija la opción de Un jugador para ejecutar una coincidencia cronometrada por su cuenta, con un reloj en pantalla y la conmutación automática de Enable-Disable y Autonomous-Driver Control. Elija Multi-Player para permitir que varios equipos practiquen partidos, con un jugador recibiendo un partido y hasta otros tres equipos que se unan al partido. Una vez conectados, los cuatro equipos tienen sincronizadas las señales de Habilitar, Deshabilitar, Autónoma y Control de Conductor. Los usuarios ya no necesitan tener un conmutador de competencia y un cronómetro.
Se está desarrollando una aplicación para iOS y Android que permite la visualización y el control remoto de la pantalla del Cerebro del V5. Esto amplía en gran medida la utilidad de los tableros al permitir la visualización mientras se prueba y se practica. La aplicación también convertirá su teléfono en un sensor, permitiendo que su robot acceda a la hora y a la fecha, la ubicación del GPS, giroscopio y acelerómetros, y la capacidad de twittear.
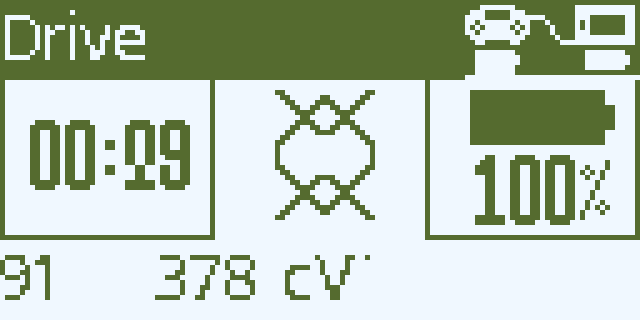
Controlador V5

La mejor mejora para el controlador V5 es su pantalla. La pantalla permite a los usuarios iniciar y detener programas de forma remota, ver el nivel de batería del robot y ver el estado de la radio. Durante la competencia, los conductores y los copilotos atados pueden ver el reloj de la competencia y el estado del juego. La pantalla es compatible con 10 idiomas.
Los programadores pueden enviar datos y texto multilingüe a la pantalla para la depuración y la información del controlador. Los widgets programables adicionales permiten a los usuarios mostrar medidores que pueden ser digitales, analógicos y numéricos. Se pueden enviar mensajes independientes a cada controlador cuando se utilizan dos controladores conectados.
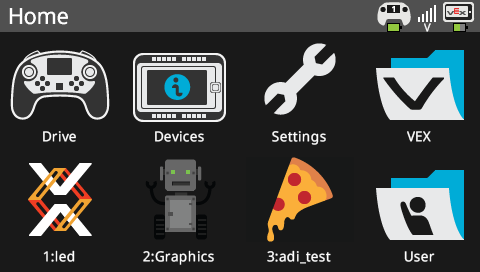
Pantalla de inicio

Opciones de ejecución

Pantalla de usuario
Configuraciones

Programas de usuario

Match Hosting

Práctica de competencia

Práctica de habilidades para el conductor

El controlador usa una batería interna recargable con un tiempo de funcionamiento de 10 horas y una batería de larga duración. La batería está diseñada para funcionar todo el día en eventos sin necesidad de recarga. La carga se realiza a través de un cable micro USB y dura aproximadamente 1 hora.
- Características:
- Dos Puertos Inteligentes se utilizan para conectar el Cerebro y Anclar dos Controladores
- Un puerto de control de campo para competiciones
- USB para cargar y para programación y depuración inalámbricas
- 12 botones son completamente configurables por los programas del usuario
- Los botones también se utilizan para la navegación del menú cuando un programa no se está ejecutando
- Dos joysticks de 2 ejes para un control preciso del robot
Batería del Robot V5
El Cerebro del Robot V5, la Batería del Robot y el Motor Inteligente funcionan en conjunto para mejorar el rendimiento, incluso cuando la carga de la batería es baja. La batería del robot V5 fue diseñada para permitir que los motores funcionen a su máximo potencial. La batería tiene suficiente potencia para ejecutar diez motores V5 a máxima potencia continuamente.
Potencia máxima
de la
batería
Potencia máxima
del
motor
Potencia del motor
@ Batería baja
La química de la batería de hidruro metálico de níquel (NiMH) ya no satisface las necesidades de las aplicaciones móviles de alta potencia de hoy en día. Las baterías de iones de litio son el futuro; sin embargo, cuando se usan en paquetes multicelulares, pueden tener problemas de seguridad y vida corta cuando se usan a altos niveles de corriente. VEX eligió una batería de litio de química química LiFePO 4 debido a su seguridad y alta capacidad de corriente. Además, las baterías nuevas tienen 4 veces la vida útil de las baterías de NiMH.

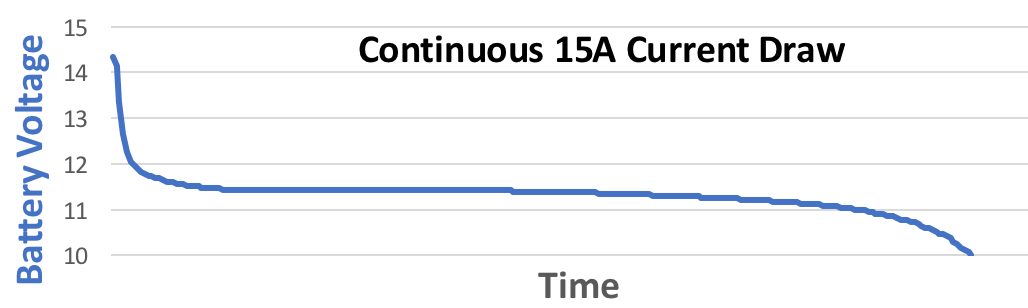
El mayor cambio en la batería del robot V5 es la mayor tensión nominal de 12.8v. La batería carga hasta 14.6v y baja a 10v. Debido al voltaje de salida muy constante de estas baterías, el Cerebro del Robot no puede determinar la capacidad restante utilizando el método típico de medir el voltaje y la capacidad de estimación. En cambio, el paquete de baterías V5 tiene un sistema inteligente de administración de baterías que mide los cambios en la carga eléctrica (coulombs) dentro y fuera de la batería durante la carga y la descarga. A partir de estos datos, la batería determina la cantidad real de energía restante.
El sistema de administración inteligente de la batería también maneja el equilibrio y la carga de la celda. El equilibrio de la celda es fundamental para mantener el rendimiento de la batería con el tiempo, asegurándose de que cada celda del paquete tenga el mismo voltaje. El tiempo de carga es de aproximadamente 60 minutos.
El tiempo de funcionamiento de la batería depende de muchos factores, incluidos el diseño de su robot, su conducción y la cantidad de motores utilizados. Los robots a menudo obtienen más de 30 minutos de tiempo de conducción pesado con una sola carga. Los equipos de competición deberían poder usar una batería de robot para múltiples partidas sin recargar. Recuerde que con V5, una batería baja no cambia el rendimiento del motor. La batería V5 puede dar salida a 20 amperios de forma continua, proporcionando suficiente potencia para ejecutar 10 motores en la salida de potencia máxima.
Puertos de 3 hilos V5

El sistema V5 hace un uso significativo de dispositivos inteligentes, sin embargo, todavía tenemos que trabajar con dispositivos analógicos y digitales. Además, la base de usuarios VEX EDR tiene interruptores, potenciómetros y sensores que todavía son perfectamente buenos, por lo que mantuvimos la función de los dispositivos de 3 hilos en V5. En el camino, hicimos algunas mejoras.
Los puertos de 3 hilos ahora son multiusos. Cualquier puerto de 3 hilos puede ser una entrada digital, salida digital, entrada analógica o control de motor PWM. Esto mejora la flexibilidad y garantiza que siempre puedas usar todos los puertos si es necesario. Cuando ocho puertos de 3 hilos no son suficientes, simplemente conecte un expansor externo de 3 cables en cualquier puerto inteligente para obtener ocho puertos de 3 hilos adicionales.
Los ocho puertos de 3 hilos ahora forman un dispositivo inteligente. Un microcontrolador Cortex M0 dedicado tiene la responsabilidad exclusiva de leer las entradas y las salidas de alternancia. Los datos se informan al usuario en el momento en que se miden. Esto significa que los cambios de entrada digital disparan un mensaje inmediato basado en interrupciones a la memoria del sensor del usuario para minimizar la latencia. Las entradas analógicas se filtran previamente durante 5 milisegundos y luego se mueven a la memoria del sensor de usuario de forma continua.