







Mide las aceleraciones en tres ejes simultáneamente. Al medir la aceleración del robot, se puede calcular la velocidad del robot o la distancia recorrida por este robot. Los acelerómetros también son ideales para detectar colisiones y determinar si el robot está parado o en movimiento.

El acelerómetro micromecanizado capacitivo LIS344ALH ofrece acondicionamiento de señal, filtro de paso bajo de 1 polo, compensación de temperatura y g Seleccione que permite seleccionar entre 2 sensibilidades. Zero-g offset La escala completa y el corte del filtro se ajustan de fábrica y no requieren dispositivos externos.
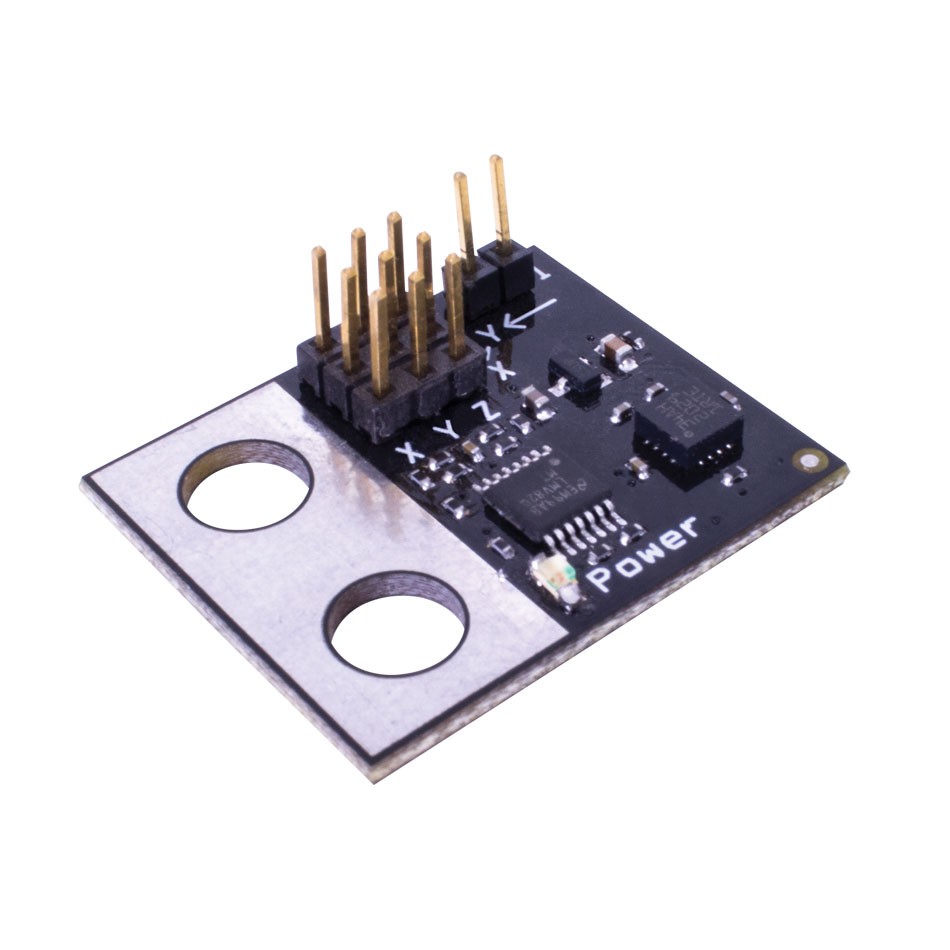
El sensor medirá la aceleración en ambas direcciones a lo largo de cada uno de los 3 ejes. La aceleración a lo largo del eje X o Y en la dirección de las flechas silkscreened producirá una lectura más grande, mientras que la aceleración en la dirección opuesta producirá una lectura más pequeña. Para el eje Z, la aceleración hacia arriba (en la dirección de la cara de la placa) produce valores mayores, y la aceleración hacia abajo (hacia la parte posterior de la placa) produce valores más bajos.
La gravedad es indistinguible de la aceleración ascendente, por lo que el sensor detectará una constante 1.0G mientras está en reposo. Si la placa está montada horizontalmente, la gravedad sólo afectará al eje Z. Si el sensor se inclina hacia afuera de la horizontal, la lectura de la gravedad en el eje Z disminuirá y las lecturas en el otro eje cambiarán dependiendo de la forma en que lo incline.
Cada canal utilizado debe estar conectado a una entrada analógica en el microcontrolador VEX utilizando un cable de extensión servo estándar. Usted no tiene que conectar todos los canales; Sólo necesita conectar los necesarios para su aplicación. El cable blanco (de señal) de cada cable de extensión se aproxima a los hilos de seda "X", "Y" o "Z" de la placa. Los cables negros (tierra) van en el otro extremo, adyacente al "B" serigrafiado en el tablero. El cable central es de +5 voltios. Además, los orificios de montaje están aislados eléctricamente del circuito.
El acelerómetro tiene dos rangos de sensibilidad, seleccionados por un puente. El pin 1 del Jumper (el pin más cercano a la marca "Y") se conecta directamente al LIS344ALH con una resistencia de pulso 1K. El pin 2 del puente se conecta a +3,3 voltios. La manera fácil de recordar la configuración de los puentes es agregar los valores del puente instalado; Cuanto mayor sea la suma, mayor será el rango.
| Jumpers | Suma | Distancia | Salida (-1g a + 1g) |
|---|---|---|---|
| none | 0 | +/- 2.0g | 1,6 voltios a 3,4 voltios |
| 1 solamente | 1 | +/- 6.0g | 2,2 voltios a 2,8 voltios |
Puede controlar los rangos de sensibilidad remotamente conectando su señal de control al pin 1 de los Jumpers. El voltaje de entrada máximo para los puentes es +3.3 voltios. Para más detalles, consulte la hoja de datos del chip STMicroelectronics LIS344ALH.
(1) Acelerómetro
(1) Jumper
El sensor medirá la aceleración en ambas direcciones a lo largo de cada eje.
Compatible con todos los microcontroladores VEX y cables de extensión de 3 hilos
{kind=link}
{kind=link}